人形机器人技术细节
2026年,人形机器人已从实验室“炫技”阶段正式进入商业化量产元年。根据CES 2026展会、Schaeffler、IFR及多家厂商披露数据,全球出货量突破数万台,中国厂商(宇树Unitree、智元Agibot)占据近80%份额。核心驱动力在于执行器成本占比从70%降至可控水平、端到端VLA(Vision-Language-Action)大模型落地以及电动化取代液压。
人形机器人技术深度解析(2026最新版)
2026年,人形机器人已从实验室“炫技”阶段正式进入商业化量产元年。根据CES 2026展会、Schaeffler、IFR及多家厂商披露数据,全球出货量突破数万台,中国厂商(宇树Unitree、智元Agibot)占据近80%份额。核心驱动力在于执行器成本占比从70%降至可控水平、端到端VLA(Vision-Language-Action)大模型落地以及电动化取代液压。本篇从机械、感知、控制、AI、能源、材料六大维度系统拆解技术细节,结合真实案例、架构图解、挑战边缘案例与产业影响,提供全面技术地图。
1. 机械结构与执行器(核心硬件,占BOM 50-70%)
人形机器人通常拥有28-40个自由度(DOF),模仿人体骨骼与关节。2026主流设计:
腿部:6 DOF/腿(髋3、膝1、踝2),峰值扭矩360-450 Nm(宇树H2腿部360 Nm、EngineAI T800达450 Nm)。
手臂:7 DOF/臂 + 手部22 DOF(特斯拉Optimus Gen3手部22 DOF、50个执行器)。
腰部/头:3 DOF腰 + 2 DOF头,实现扭转与视线跟随(Agibot A2总40+ DOF)。
执行器类型与演进:
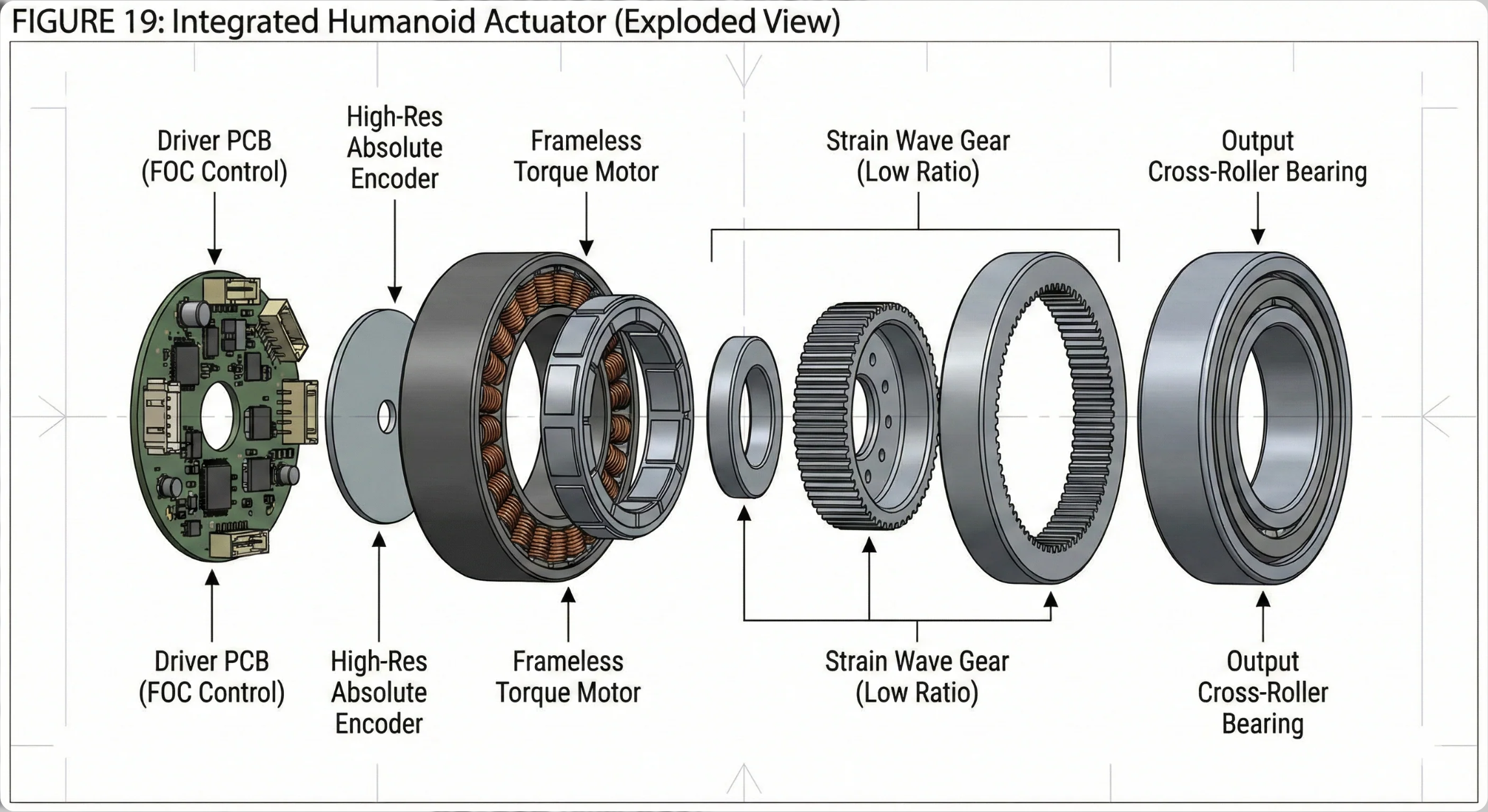
准直驱(QDD)与集成执行器:2026主流。电机+高精度编码器+减速器+扭矩传感器一体化(Schaeffler集成方案)。优点:低背隙(<1%)、高效率(>85%)、高背驱性(便于人类交互与安全碰撞)。
常见减速器:谐波(Strain Wave,低比速、高精度)、行星滚柱丝杠(线性关节)、摆线(Cycloid,高扭矩)。
示例:宇树H2腿部采用高扭矩电动执行器,峰值360 Nm,支持飞踢、空翻;Agibot远征A2-W峰值350-512 Nm,负载14 kg物料。
特斯拉Optimus Gen3手部突破:重执行器后置前臂,肌腱驱动+微型滚珠丝杠,精度0.08 mm,能捏鸡蛋不碎、系鞋带。手部执行器占整机成本20%,但Gen3通过国产化+规模化将整机成本压至2-2.5万美元。
电动化全面替代液压:Boston Dynamics新Atlas(CES 2026)抛弃液压,转用自定义电动执行器+轻质铝钛框架,安静、高效、维护成本低(液压曾占旧Atlas 60%能耗与噪声)。
边缘案例:高冲击场景(如工厂碰撞)需最高冲击抵抗与扭矩透明度(Schaeffler强调无传感器控制);轻量化需求推动镁铝合金骨架(EngineAI T800重75 kg)。
(上图:集成执行器爆炸图与谐波减速器组件;下图:旋转 vs 线性执行器对比,展示膝关节控制原理。)
2. 感知与传感器系统(“眼睛+皮肤”)
多模态融合是2026关键:
视觉:RGBD深度相机+360° LiDAR(Agibot A2多处RGBD+Fisheye;Unitree H2双目立体相机)。
力觉/触觉:关节扭矩/位置传感器 + 全身触觉皮肤(Boston Dynamics Atlas手部触觉阵列;Figure Helix支持手指力反馈)。
惯性与本体:IMU(平衡)、力传感器(负载14 kg物料时实时反馈)。
其他:麦克风阵列、语音识别、mmWave雷达(避障)。
nuance:2026趋势是“分布式感知”——执行器内置传感器(Schaeffler MEMS扭矩传感器,精度1%满量程),降低延迟。边缘挑战:光照/遮挡下LiDAR融合失效时,VLA模型需实时补偿。
3. 控制系统架构(分层金字塔式)
经典三层架构(2026已标准化):
顶层(10 Hz):任务规划器(Task Planner),接收自然语言指令(如“走到门边”)。
中层(500-1000 Hz):Whole-Body Controller(全身控制器),采用模型预测控制(MPC)+强化学习(RL),协调重心(CoM)、所有关节轨迹。
底层(20,000 Hz):FOC(磁场定向控制)电机驱动器,精确注入电流。
2026升级:端到端神经网络取代部分传统控制(Tesla FSD式迁移)。NVIDIA Isaac Lab用于仿真验证腿部6种配置,优化扭矩与稳定性。
Humanoid Robot Actuators: The Complete Engineering Guide
(上图:典型全身控制金字塔架构,展示频率分层与传感器反馈闭环。)
4. AI智能核心:VLA(Vision-Language-Action)模型
2026最大突破——从模块化转向端到端VLA,输入图像+语言,输出关节扭矩/动作。
单模型架构(RT-2、OpenVLA、π0):一个Transformer同时处理视觉-语言-动作,延迟低。
双系统架构(Figure Helix、NVIDIA GR00T N1):System 2(低频7B VLM语义推理)+ System 1(高频扩散Transformer实时控制),支持全身上半身(手臂+手指+躯干)高频操控。
训练:20,000+小时真实数据 + 仿真(Isaac Lab),扩散策略(Diffusion Policy)生成平滑动作。GR00T N1开源,支持双臂操纵;Helix单权重覆盖3000+任务。
例子:
宇树H2:OTA更新AI模型,实现武术/舞蹈。
Agibot A2:多模态交互(书法演示、语音)。
特斯拉:Helix式+自有端到端,2026 Q1量产。
边缘案例:长时序任务(如组装)需分层规划(Intent-to-Action Planner);现实差距(sim-to-real)通过RL fine-tuning解决。
(上图:典型VLA双系统架构与Diffusion Transformer动作生成;下图:Helix双系统示例,实现实时上半身控制。)
5. 电源与能源管理
电池:15-700 Wh快换锂电池(Unitree H2约0.97 kWh,续航2-3小时;Agibot支持热插拔)。
效率:高背驱性+高效减速器,续航提升40%。热管理(Schaeffler集成)防止过热。
边缘:重负载(150 lbs deadlift,Tesla)下功耗激增,需动态功率分配。
6. 材料、安全与设计
轻量化:铝钛/镁合金 + 碳纤维(Atlas新版)。
安全:力限制、碰撞检测、ISO标准(2026工信部具身智能标准体系)。背驱性允许被动顺从。
成本拆解(Schaeffler数据):执行器~50%、手部~20%、电池/视觉<10%、AI芯片>10%。
挑战、边缘案例与产业影响
挑战:泛化(新场景泛化率<80%需持续数据)、能耗(电池瓶颈)、安全伦理(黑箱责任)、高初始投资。
边缘:极端环境(高温/冲击)需最高耐冲击执行器;中小厂ROI计算——RaaS租赁模式缓解。
影响:2026-2035市场达4162亿美元,重塑制造业(黑灯工厂)、物流、服务。缓解劳动力缺口,但需伦理框架与再培训。
总结与展望:2026是“身体”(硬件执行器+传感器)与“灵魂”(VLA)完美融合元年。中国供应链优势(国产化率>75%)使成本领先全球,特斯拉/Figure算法优势互补。未来方向:百万台规模、家庭渗透、6G多机协同。技术已成熟,商业化速度取决于标准化与数据生态。